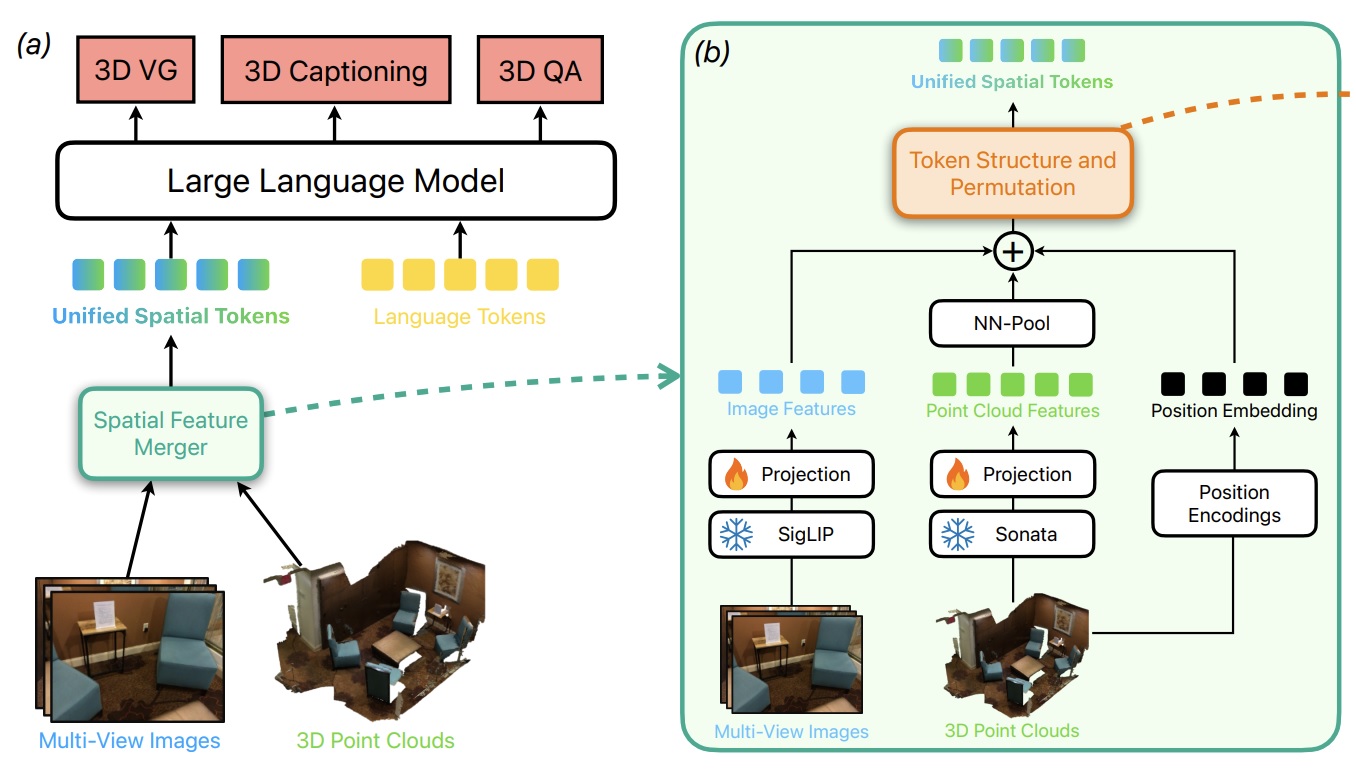
Pts3D-LLM: Studying the Impact of Token Structure for 3D Scene Understanding With Large Language Models. ArXiv.
H. Thomas, C. Chen, J. Zhang
[PDF]
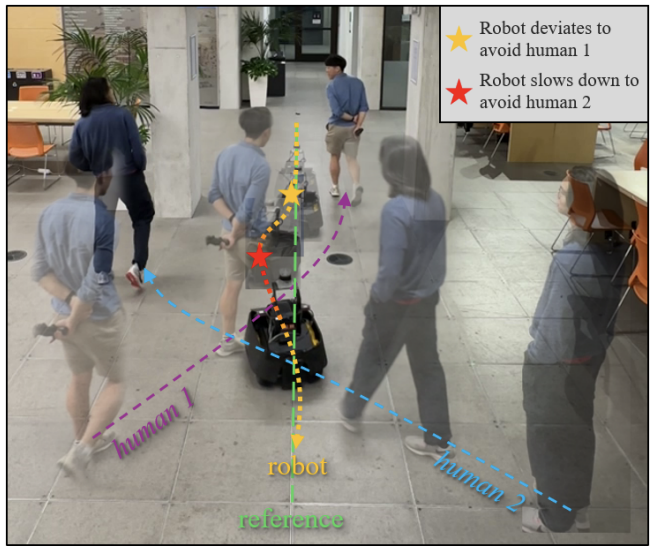
DR-MPC: Deep Residual Model Predictive Control for Real-world Social Navigation. ArXiv.
J.R. Han, H. Thomas, J. Zhang, N. Rhinehart, T.D. Barfoot
[PDF]
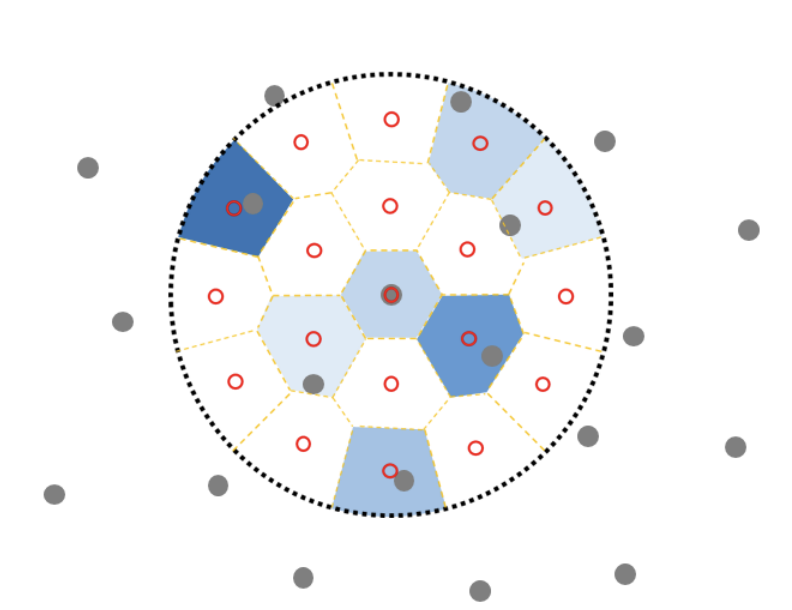
KPConvX: Modernizing Kernel Point Convolution with Kernel Attention. CVPR 2024.
H. Thomas, Y.H.H. Tsai, T.D. Barfoot, J. Zhang
[PDF]
[GitHub]
[Blog]
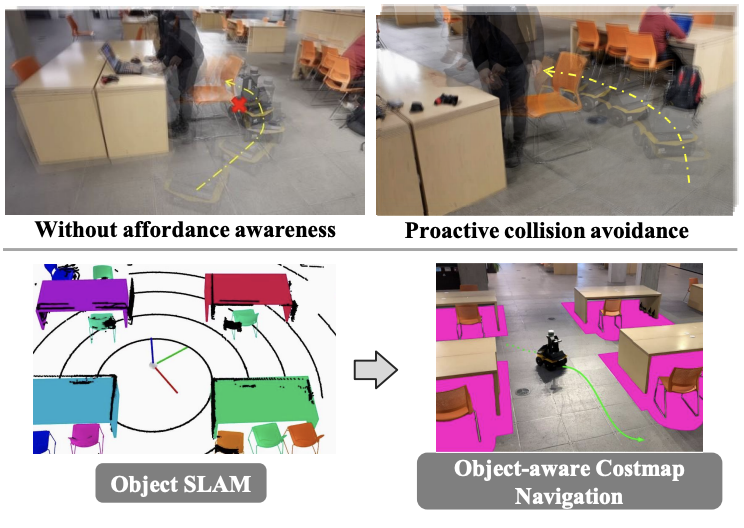
MakeWay: Object-Aware Costmaps for Proactive Indoor Navigation Using LiDAR. ArXiv.
B. Xu, A. Tao, H. Thomas, J. Zhang, T.D. Barfoot
[PDF]

Embedding Pose Graph, Enabling 3D Foundation Model Capabilities with a Compact Representation. ArXiv.
H. Thomas, M. Sivapurapu, J. Zhang
[PDF]
[Blog]
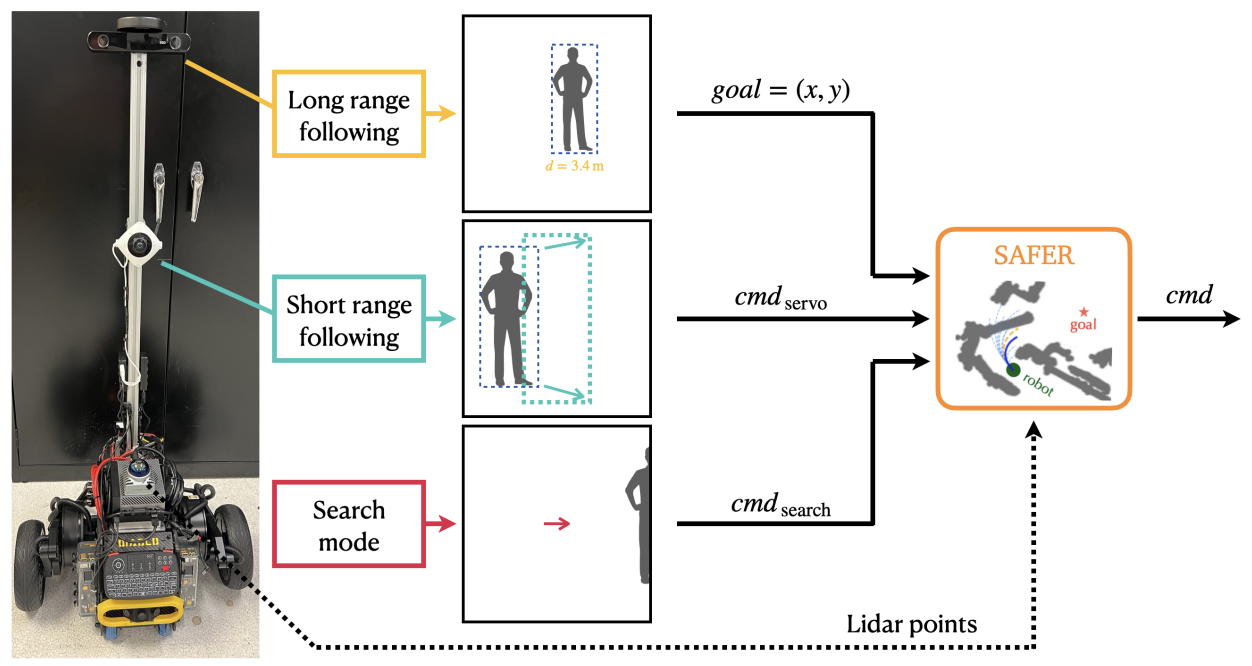
Human Following in Mobile Platforms with Person Re-Identification. CASE 2024.
M. Srouji, Y.H.H. Tsai, H. Thomas, J. Zhang
[PDF]
[Blog]
The Foreseeable Future: Self-Supervised Learning to Predict Dynamic Scenes for Indoor Navigation. TRO, presented at ICRA 2024.
H. Thomas, J. Zhang, T.D. Barfoot
[PDF]
[GitHub]
[Video]
[Dataset]

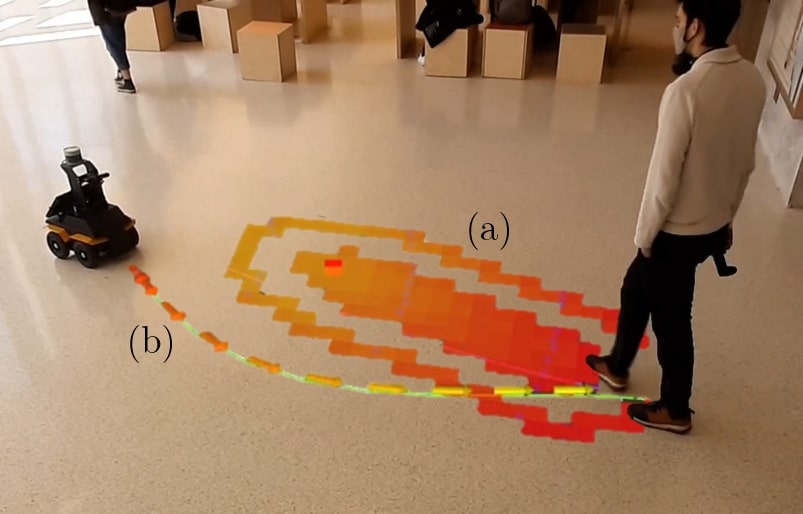
SAFER: Safe Collision Avoidance using Focused and Efficient Trajectory Search with Reinforcement Learning. CASE 2023.
M. Srouji, H. Thomas, H. Tsai, A. Farhadi, J. Zhang
[PDF]
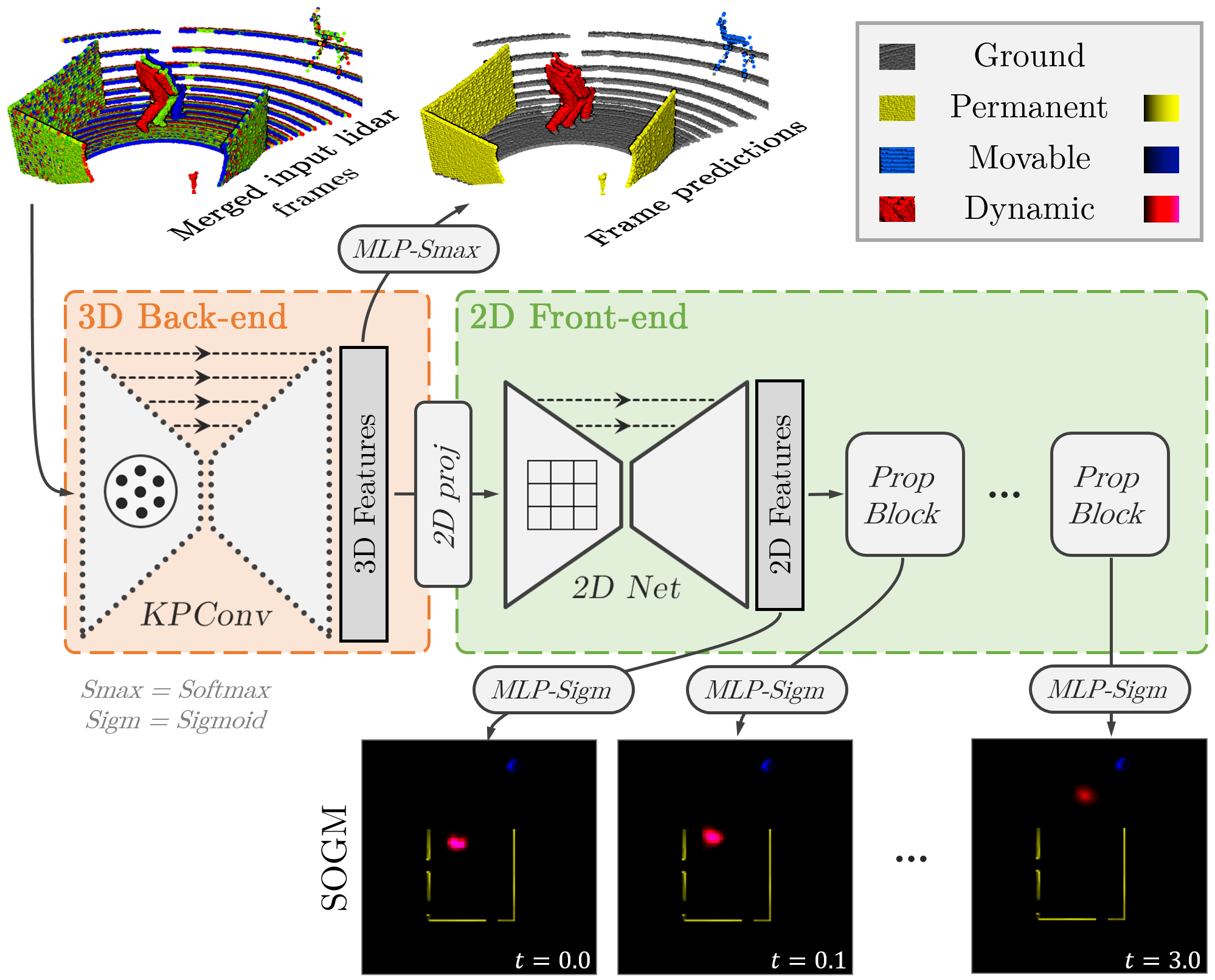
Learning Spatiotemporal Occupancy Grid Maps for Lifelong Navigation in Dynamic Scenes. ICRA 2022.
H. Thomas, M. Gallet de Saint Aurin, J. Zhang, T.D. Barfoot
[PDF]
[GitHub]
[Video]
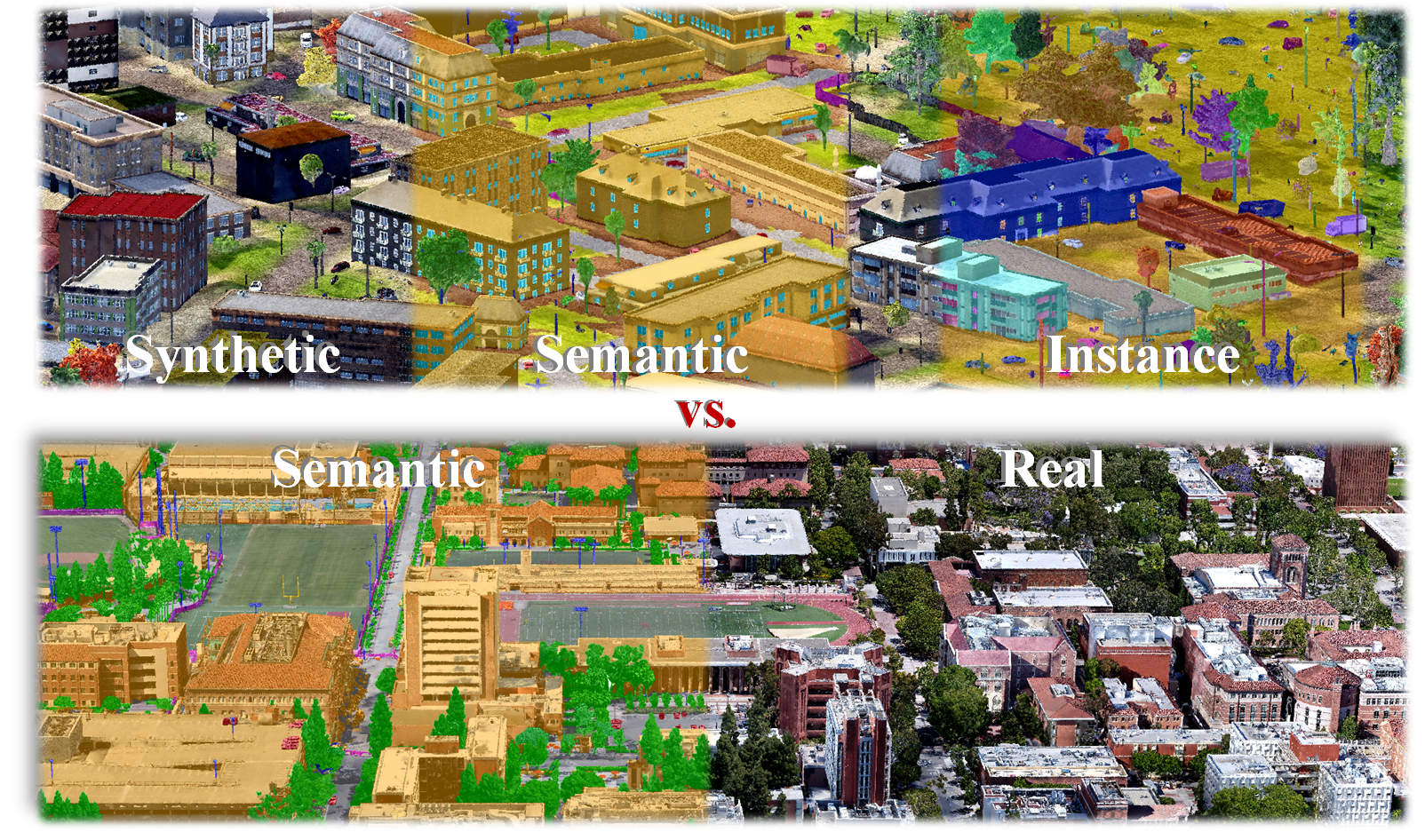
STPLS3D: A Large-Scale Synthetic and Real Aerial Photogrammetry 3D Point Cloud Dataset. BMVC 2022.
M. Chen, Q. Hu, Z. Yu, H. Thomas, A. Feng, Y. Hou, K. McCullough, F. Ren, L. Soibelman
[PDF]
[GitHub]
[Project Page]
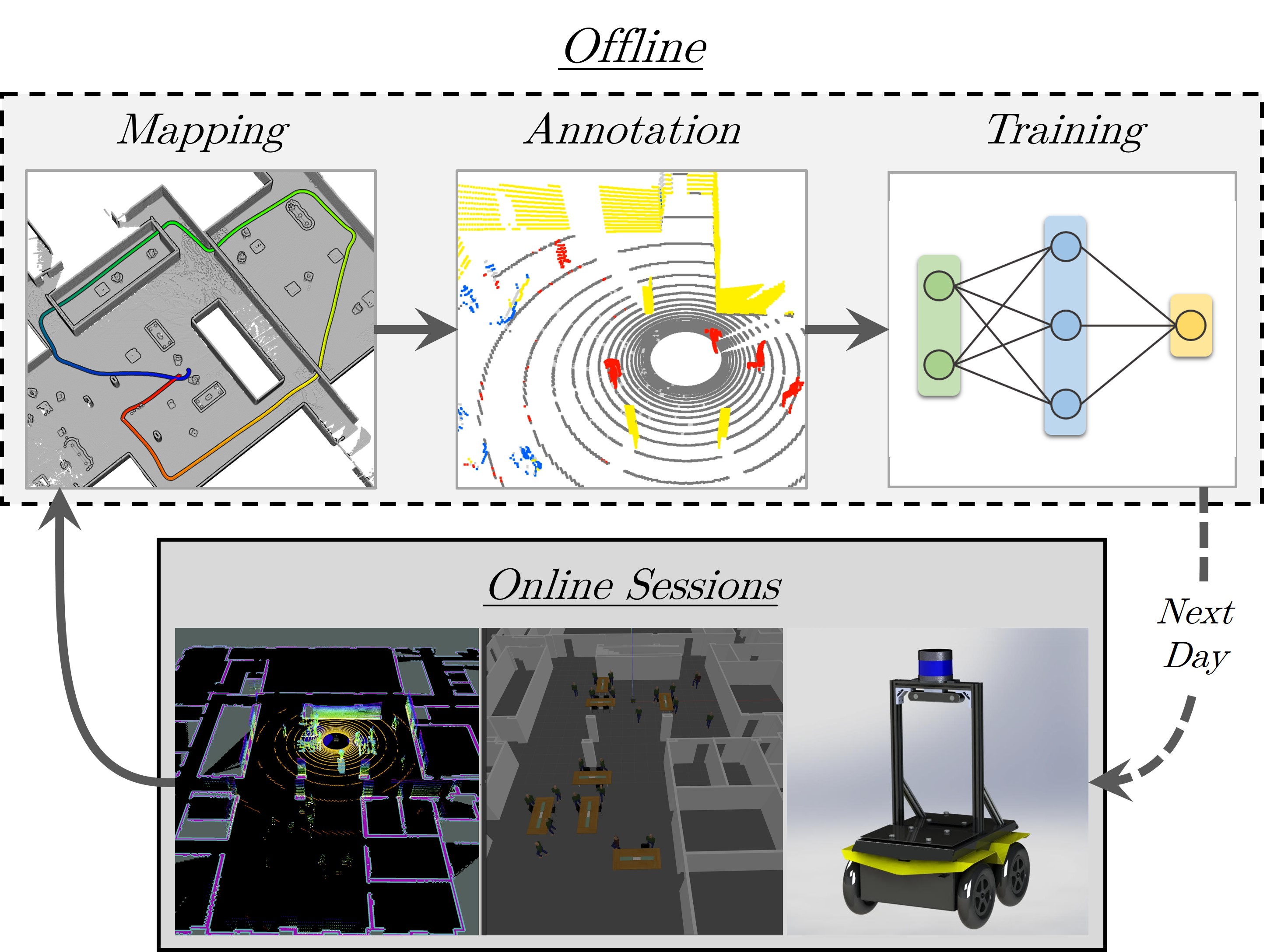
Self-Supervised Learning of Lidar Segmentation for Autonomous Indoor Navigation. ICRA 2021.
H. Thomas, B. Agro, M. Gridseth, J. Zhang, T.D. Barfoot
[PDF]
[Video]
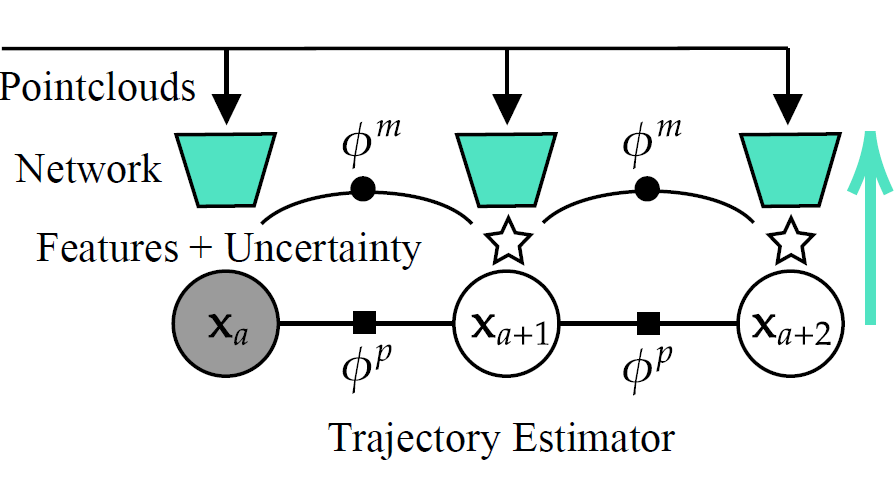
Unsupervised Learning of Lidar Features for Use in a Probabilistic Trajectory Estimator. RAL/ICRA 2021.
D. J. Yoon, H. Zhang, M. Gridseth, H. Thomas, T.D. Barfoot
[PDF]
[Video]
(Best Student Paper Award)
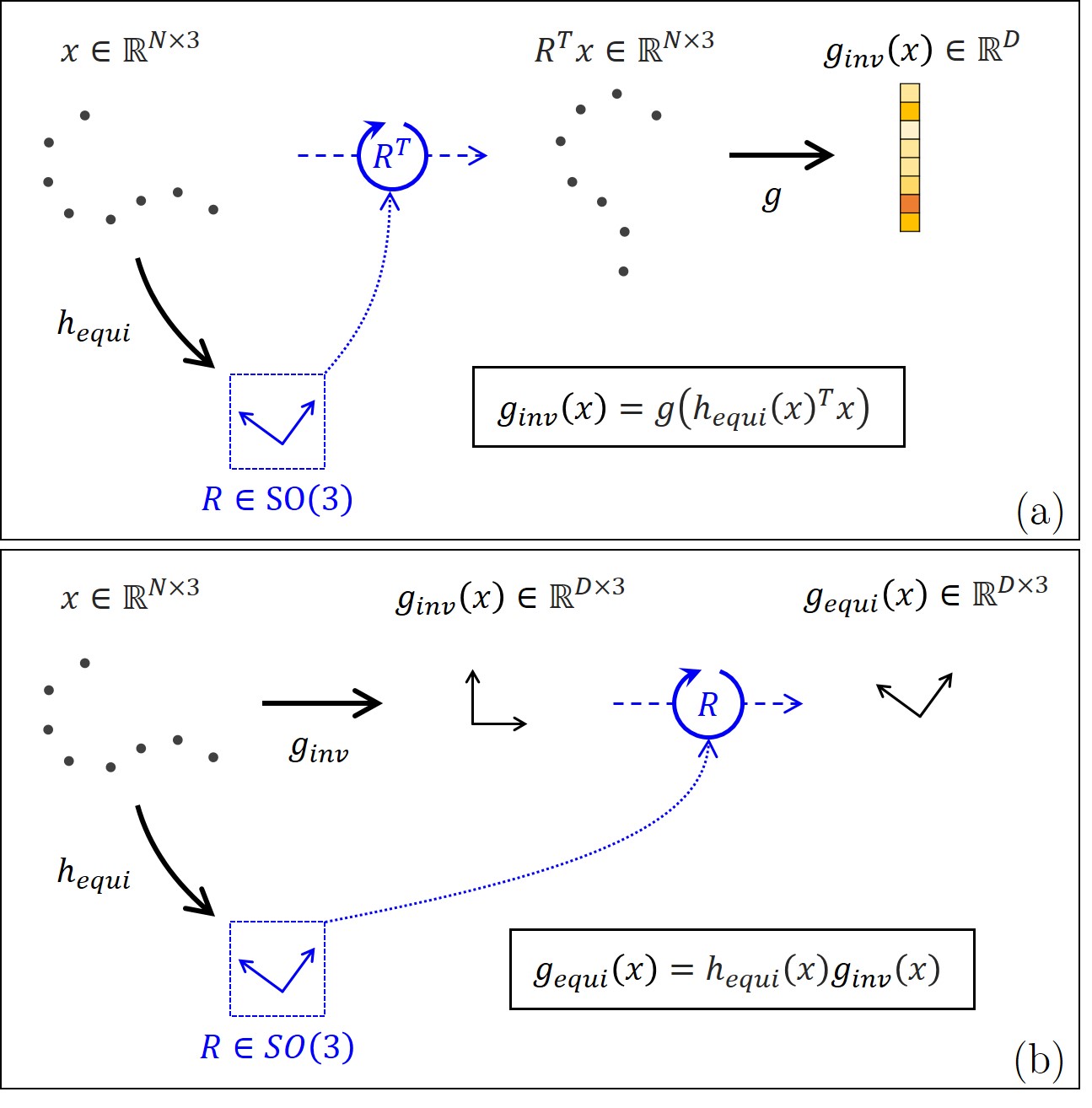
Rotation-Invariant Point Convolution With Multiple Equivariant Alignments. 3DV 2020.
H. Thomas
[PDF]
[Video]
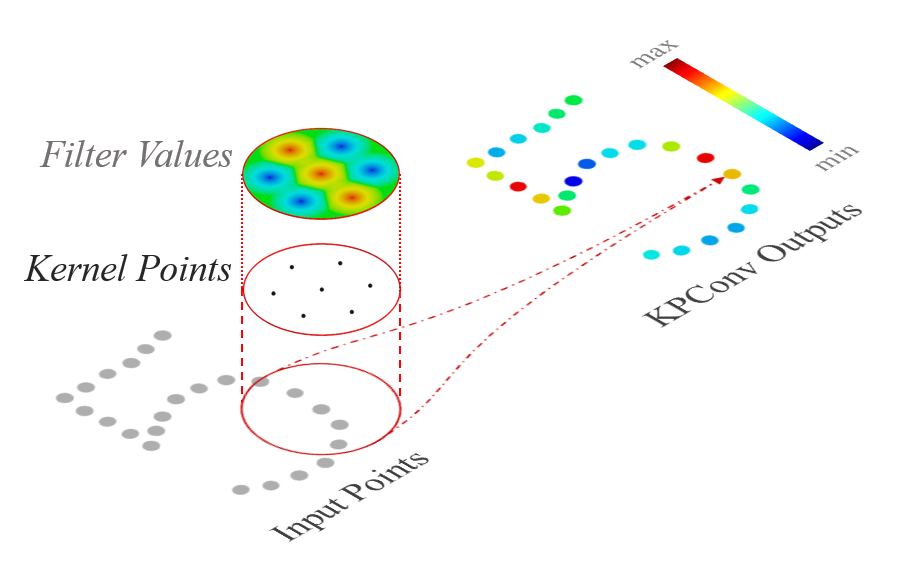
KPConv: Flexible and Deformable Convolution for Point Clouds. ICCV 2019.
H. Thomas, C. R. Qi, J. E. Deschaud, B. Marcotegui, F. Goulette, L. J. Guibas
[PDF]
[GitHub]
[Video1]
[Video2]

Semantic Classification of 3D Point Clouds with Multiscale Spherical Neighborhoods. 3DV 2018.
H. Thomas, J. E. Deschaud, B. Marcotegui, F. Goulette, Y. L. Gall
[PDF]
[Video]

Exploring Depth Information for Head Detection with Depth Images. AVSS 2016.
S. Chen, F. Bremond, H. Nguyen, H. Thomas
[PDF]